DJI Zenmuse H3-3D – Reperatur (Teil 1?)
Big Drama…
Ich hatte letztens einen ziemlich schlimmen Crash mit meinem DJI F550. Es kam zu einem katastrophalen Aufschaukeln des Copters, das ich nicht mehr in den Griff bekommen habe. Das Drama war allerdings, dass mein geliebtes DJI Zenmuse H3-3D Gimbal unter dem Copter hing, als er aufs Dach fiel. Das Gimbal sah dann so aus… (Gott sei Dank ist die GoPro OK…)
Griff bekommen habe. Das Drama war allerdings, dass mein geliebtes DJI Zenmuse H3-3D Gimbal unter dem Copter hing, als er aufs Dach fiel. Das Gimbal sah dann so aus… (Gott sei Dank ist die GoPro OK…)
Das erste Problem war eine klemmende ‚roll‘-Achse des Gimbals. Diese ließ sich allerdings recht einfach reparieren, es gibt an der Achse des ‚roll‘-Stellers eine Schraube, mit der der Arm an der Achse geklemmt ist. Der Arm hatte sich durch den Aufprall auf der Achse verschoben, was sich durch öffnen der Madenschraube rückgängig machen ließ.
 Bei genauerem Hinsehen jedoch, sah ich einen defekten Hall-Sensor am ’nick‘-Motor des Gimbals. Jetzt war natürlich guter Rat teuer,
Bei genauerem Hinsehen jedoch, sah ich einen defekten Hall-Sensor am ’nick‘-Motor des Gimbals. Jetzt war natürlich guter Rat teuer, googeln eine Suche im Internet ergab zumindest, dass die von DJI verwendeten Motoren scheinbar von niemandem hergestellt werden; es gibt sie zumindest nicht zu kaufen. Nichtmal bei Alibaba.
Nachdem ich den besagten Motor ausgebaut hatte (Bilder siehe unten), bröselte mir der Hall-Effekt-Sensor auch schon entgegen. Die beiden anderen Sensoren waren beide mit ‚1432‘ beschriftet, was auch nach längerem Suchen leider nicht sehr hilfreich war. Interessant war, dass die Pins 1 und 3 der (verbleibenden)  SOT23-Gehäuse miteinander verbunden waren, es hatte auch den Anschein dass Pin 2 mit einer Massefläche verbunden war. Etwas cross-referencing später stand fest dass die belegung 1: VCC, 2: OUT, 3: GND eine übliche Belegung für Hall-Effekt Sensoren in SOT23 Gehäusen ist. Praktischerweise befand sich auf dem flex-Board noch ein kleiner Keramik-Kondensator, welcher
SOT23-Gehäuse miteinander verbunden waren, es hatte auch den Anschein dass Pin 2 mit einer Massefläche verbunden war. Etwas cross-referencing später stand fest dass die belegung 1: VCC, 2: OUT, 3: GND eine übliche Belegung für Hall-Effekt Sensoren in SOT23 Gehäusen ist. Praktischerweise befand sich auf dem flex-Board noch ein kleiner Keramik-Kondensator, welcher oh Wunder mit VCC und GND verbunden war. Ich konnte zudem den Ausgang eines verbleibenden Sensors zum Stecker zurückverfolgen, wo ich das Kapton abgekratzt, und einen Draht angeschlossen habe (Pinout im Bild bitte nochmals nachmessen). Ich habe ein current Limit von 5mA gesetzt und die Spannung langsam auf  4,5V gesteigert, allerdings ohne Rekation auf ‚Stimulation‘ mit einem (Neodym-) Magneten. Erst als ich im Oszi winzige Spikes erkennen konnte, dämmerte es mir, dass es sich eventuell um ein Open-Drain-Ausgang seitens des Sensors handeln könnte.
4,5V gesteigert, allerdings ohne Rekation auf ‚Stimulation‘ mit einem (Neodym-) Magneten. Erst als ich im Oszi winzige Spikes erkennen konnte, dämmerte es mir, dass es sich eventuell um ein Open-Drain-Ausgang seitens des Sensors handeln könnte.
Aber welcher Typ Hall-Effekt-Sensor ist das denn jetzt?
Es gibt verschiedene Typen Hall-Effekt-Sensoren. Bipolare, unipolare, latching, analog, … glücklicherweise finden sich auf Micronas‘ Youtube Kanal 2 sehr schöne Videos [1] [2], die das Verhalten von Bi-, und Unipolaren Hall-Effekt-Sensoren zeigen. Es handelte sich in unserem Fall um einen Bipolaren Hall-Effekt-Sensor. Nach kurzer Suche bei Farnell befand ich den SS360xT (x für North oder South) von Honeywell für geeignet. Das einzige was jetzt noch unklar war, war die Polarität (Nord-ein oder Süd-ein) des Sensors. Ich habe kurzerhand beide Kategorien bestellt.

Nachdem ich gestet hatte, welche Polarität (NORTH – also der SS360NT) zu der der restlichen Sensoren passt, habe ich den Sensor im Motor montiert und einen Draht für die Tests in bewährter Weise angeschlossen…
Die Pullups habe ich ‚freestyle‘ montiert. Jetzt fehlt natürlich noch der Test mit entsprechendem Motor…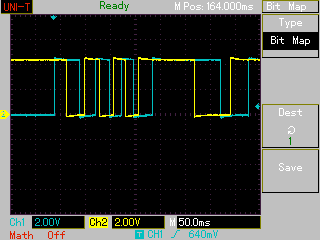
Sieht ja eigentlich ganz prima aus… Gelb ist der neue Sensor. Interessant ist, dass der Ausgang des neuen Sensors beim Einschalten ‚high‘ zu sein, was bei den anderen ja nicht der Fall zu sein scheint..
Ansonsten sieht das Signal ja aus wie man es sich vorstellt. Denkt man sich noch ein 3. Signal dazu, ergibt sich im Prinzip die erwarteten Magnet-Positionen, quasi 120° auseinander…




Jetzt gilt es natürlich den Gimbal-Motor wieder zusammen zu bauen. Wichtig ist, dass das weiße Zahnrad, dass das Poti in der Controllerplatine dreht, mit seiner ‚Macke‘ genau mit der eingeschliffenen ‚Macke‘ der Motorachse übereinstimmt. Ansonsten funktioniert die closed-loop-control nicht richtig. Ansonsten geht das Zusammenbauen wie das Auseinanderbauen. Schrauben immer auf die ‚Macken’…
Tada – Gimbal  funktioniert wieder 🙂
funktioniert wieder 🙂
Der Winkel des ‚roll‘ Motors stimmt noch nicht ganz da der
 Strut noch verbogen ist. … das ist vielleicht was für Teil 2 … 😉
Strut noch verbogen ist. … das ist vielleicht was für Teil 2 … 😉
I have a P2 with a DJI Zenmuse H3-3D, I need motor control board YAW Driver V1
Hi I think buying a defective gimbal from ebay should work. Or you can always try DJI…
I have a P2 with a DJI Zenmuse H3-3D but it seems one of the ports on the motor control board where the ribbon cable attaches has come off the board do you know a place where I can get a replacement board?
No. It is a ca 15mm long piece of machined metal witz a set screw in it. The plastic piece in the image is just a press fit piece for turning the position feedback pot on the PCB.
Is this image you posted, the adapter you mean? http://www.tobias-schlegel.de/wp-content/uploads/2015/03/image011.jpg, the h43d dont seem to have that….
Hi,
I’m sorry but no. The Bells are fixed to the axles, most likely by shrinking them onto the axles and or by crimping.
The only thing you can do is to remove the bells and the axles as complete assembly, by losening the
setscrew on the axle adapters. You can then push the axles through the Stators and thus remove the assembly.
Good luck!
Hi,I’m having a hard time removing the motor bells. I’m using the h43d but it looks very similar to your h33d. Do you have detail pics how u removed the bells please?
Thanks!
It’s quite easy, as soon as you remove the hardware attached to the motors (small hex screws) you can remove the magnetic bell…
nice post, one question, how do u manage to open the motors?